

 牛道配资
牛道配资
自三月底小米那起惨烈的辅助驾驶事故引发了有关部门对自动驾驶的强监管之后,监管部门终于要放行L3级有条件自动驾驶了。
当务之急,是要搞清楚从L2++到L3,哪些零部件即将迎来升级?
01
卷是人生的常态,躺平是因为发生了意外。
不出意外的话,在这场从L2组合辅助驾驶向L3有条件自动驾驶的惊天一跃中,以摄像头为代表的感知传感器将首当其冲地迎来大规模的升级。

在目前所有L2++车辆中,除了抠门的显眼包特斯拉使用了500万像素前视摄像头,其他车辆的前视摄像头均为800万像素。
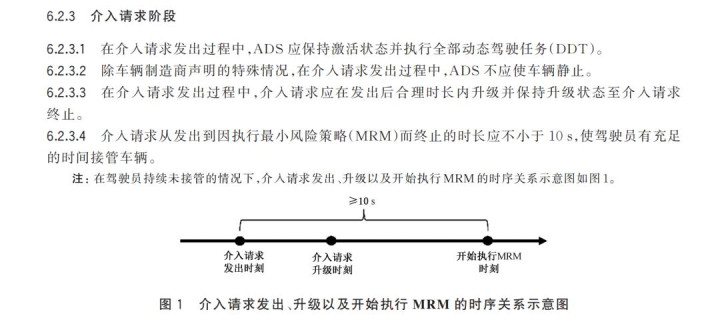
为了应对L3车辆需要提前10秒钟提醒驾驶员接管的强要求,采用探测距离更远的更高像素摄像头成了应有之义。
很多特斯拉的铁粉和马斯克的死忠粉对这个观点或许会持有异议。
在他们眼里,特斯拉FSD独步大美丽,可以在500万像素摄像头的支持下做Robotaxi运营,实现类L4自动驾驶能力,前视摄像头没有必要因为自动驾驶能力从L2++向L3的演进进行像素升级。
他们的话有一定的道理,特斯拉FSD HW4.0的前向感知距离可以达到424米,在FSD生效速度上限为140公里/小时的情况下,可以满足提前十秒提醒接管的要求。
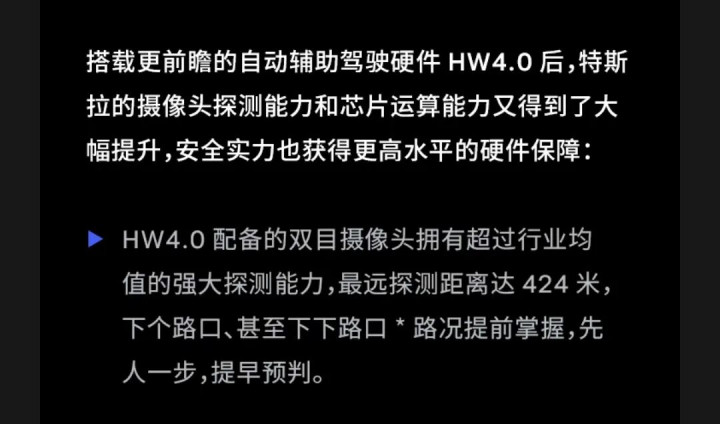
不过,这主要得益于FSD HW4.0采用的双目摄像头方案牛道配资,这种接近人类视觉的立体感知方式可以显著提升车辆对远距离目标的探测能力和测距精度。
可是,双目立体视觉处理算法过于复杂,绝大多数车企依然在前视摄像头上采用单目摄像头方案。
在这种方案下,800万像素摄像头的感知距离不到300米,无法满足提前十秒提醒接管的要求。

除了前视摄像头,更加值得一提的是环视摄像头。
目前,一些轻量级或入门级城区NOA还无法很好地处理环岛通行、180度大掉头这类场景,其背后的原因就是侧向感知能力的不足。
到了L3的时代,这些侧向环视摄像头有可能由目前的300万像素摄像头升级为800万像素。
02
橘生淮南则为橘,橘生淮北则为枳。类L4能力的特斯拉要在中国本土获得L3级车辆的生产准入,大概率也要进行传感器系统的升级。
因为,L3特别强调功能安全,纯视觉方案没有感知冗余,存在一定的局限,而激光雷达可以提供L3自动驾驶的感知冗余和安全底线。

激光雷达是L3车辆关键安全件的这个观点当然也会受到以特斯拉为代表的纯视觉技术路线阵营的挑战。
一直以来,马斯克这个行走的第一性原理代言人逮着机会就会宣称自动驾驶的第一性原理是模仿人类的眼睛、神经网络和大脑。
他给出的特斯拉坚持走纯视觉路线的核心理由是,系统不知道如何处理雷达信号和摄像头信号不一致的难题。
 牛道配资
牛道配资
不同传感器信息不一致的事情值得深入剖析一番。
在正常环境条件下,激光雷达和摄像头信息不一致主要来自于传感器之间的时钟不同步和位置不同而导致的数据对齐问题。
这个问题最近被华为、卓驭科技解决了,他们推出的激光视觉传感器将激光雷达和摄像头做在一起,通过刚性标定、严格同步解决了时空不一致引发的数据对齐问题。

在异常环境条件下,可以进一步拆分成雨雾引发的噪声大和光照条件差两个分类。
对于雨雾引发的噪声大的难题,一方面,摄像头感知降噪、激光雷达降噪算法要齐头并进,进一步降低这两个传感器在雨雾场景下的噪声,降低不一致出现的概率。
另一方面,需要进一步提升4D毫米波雷达的感知能力,4D毫米波雷达正是为这种场景而生的。
对于摄像头在夜间道路照明较差或者遇到直射太阳光这种强光的场景下无法正常工作的问题,与光照无关且能精准测距的激光雷达正好完美地解决这类场景下的目标障碍物识别难题,这时候的不一致不正好是激光雷达的用武之地嘛!
03
感知-决策-执行是自动驾驶系统的完整闭环。
L3自动驾驶需要更强的感知能力和更出色的决策能力,端到端方案需要部署更大的神经网络使得更大算力的芯片自然而然地成为了L3的一个必要条件。
说完了感知、决策,再来看执行部件,很显然,线控底盘也是L3的必要条件。

其原因有二。
首先,线控底盘实现了操作端与执行端的物理分离,线控转向取消了方向盘与转向轮之间的机械连接,线控制动取消了制动踏板与制动执行机构之间的机械或液压连接。
在人驾状态下,通过传感器检测方向盘的转角信号和制动踏板的行程,经控制器处理后,驱动转向电机执行转向动作,控制执行机构实现制动动作。
在自动驾驶状态下,自动驾驶系统可以直接向执行机构发送电信号指令,完全接管车辆的控制。
由于电信号的传输和处理速度远快于机械结构的响应,不仅响应速度快,而且执行精度高,能够满足自动驾驶系统在紧急情况下对快速、精准执行的苛刻要求。

其次,作为车辆的关键执行环节,制动和转向系统需要实现双重甚至多重冗余。
考虑到车内空间、信号传导机制、响应精度等一系列因素,以人机解耦的线控结构替代耦合式的机械和液压式结构,更加有利于实现这些执行部件的多重安全冗余。

在自动驾驶系统的感知-决策-执行三大环节中,感知传感器的数量基本上已经加无可加,接下来的进阶方向是更高像素的摄像头、更高线数的激光雷达。
作为决策大脑的大算力芯片被勤奋的本土车企和方案供应商们卷出了花,多年来的声量也很大。
唯独执行环节的制动和转向,不仅声量不高,进步幅度不算大。随着L3时代的到来,线控底盘的赛道大概率要加速了。
结合以上的分析,反观国内的量产车型,似乎只有华为的尊界S800才能称得上是真正的L3车辆。
其它车型要么算力不够,算法拉胯,要么传感器不行,底盘做得不到位。
记得小鹏说过要在25年实现L3自动驾驶能力牛道配资,不知道反映这个能力的车型到底在哪里?
财惠赚提示:文章来自网络,不代表本站观点。







